技术/产品创新性:
提出了术中内窥镜旋转误差补偿及患者移动误差补偿技术,避免了在手术过程中重新对内窥镜与传感器进行标定的不安全隐患。
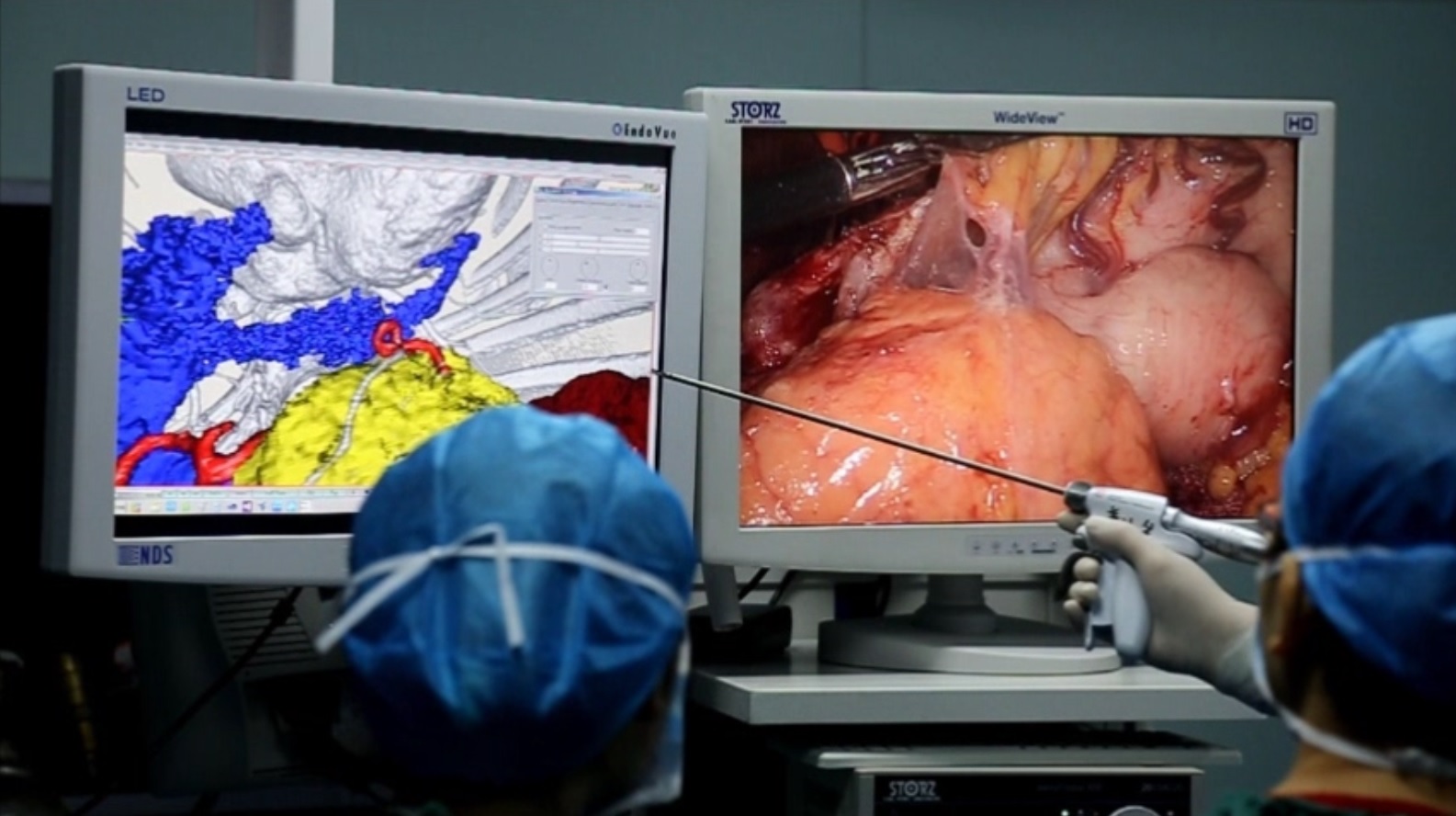
在图像处理、混合现实、人工智能、自动控制等领域前沿科学技术融合基础之上,通过虚拟与现实场景混合的技术实现了对内窥镜手术的实时引导,有效地增强医 生对手术区域和操作的信息获取能力、降低微创手术过程对手术医生主观经验的依赖程度,提高手术的有效性,降低手术风险。提出了术中内窥镜旋转误差补偿及患者移动误差补偿技术,避免了在手术过程中重新对内窥镜与传感器进行标定的不安全隐患。该系统在南方医科大学南方医院临床应用,核心技术达到国际先进水平。获吉林省科技进步一等奖,授权国家发明专利5项,软件著作权6项。