
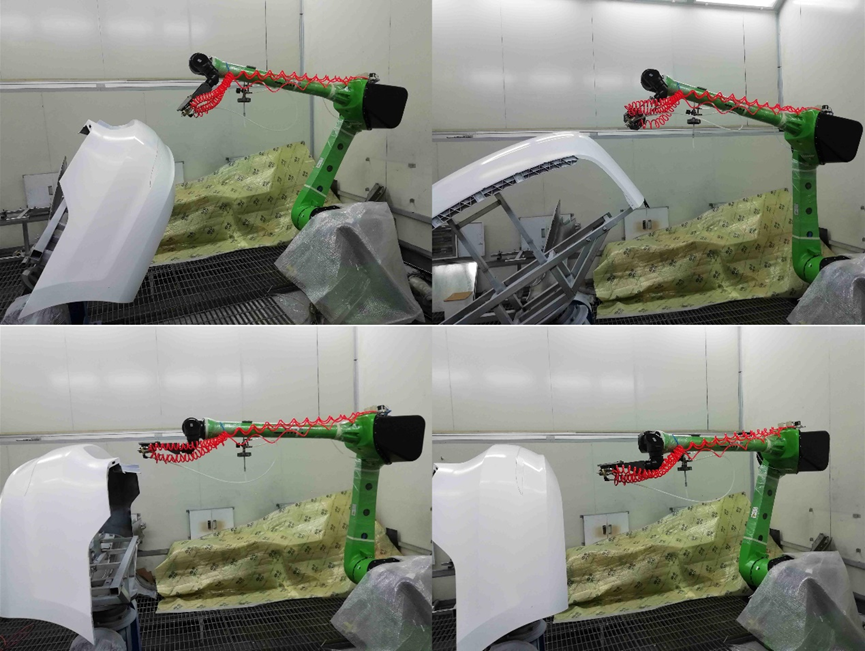
智适应喷涂机器人
——苏成志 长春理工大学
来源:
日期:2021-10-27 11:39:00

打印
字号:[大中小]
分享:
X
分享到 - 微信
来源:
日期:2021-10-27 11:39:00
打印
分享:
3.复杂表面喷涂轨迹自主规划
主要技术指标
1.漆种:油性漆、水性漆,底漆、面漆
2.基材:金属、复材
3.面形:平面、复杂曲面,立体曲面
4.部位:静部件、动部件
5.喷涂尺寸:4m×2m×2m(用户可定制)
6.喷涂形式:单件/组合喷涂
7.喷涂效率:1m2/min(工艺可调整)
8.喷涂精度:±5μm
应用领域:研制的智适应喷涂机器人成功试喷汽车外覆盖件、C919发动机桨叶、中车高铁内饰件等部件,可满足汽车、航空航天、船舶、高铁等行业表面喷涂。
