技术/产品创新性:
碳纤维等先进复合材料的制备技术、多轴机器人铺放系统控制技术、针对回转壳体的铺放轨迹规划与控制技术。
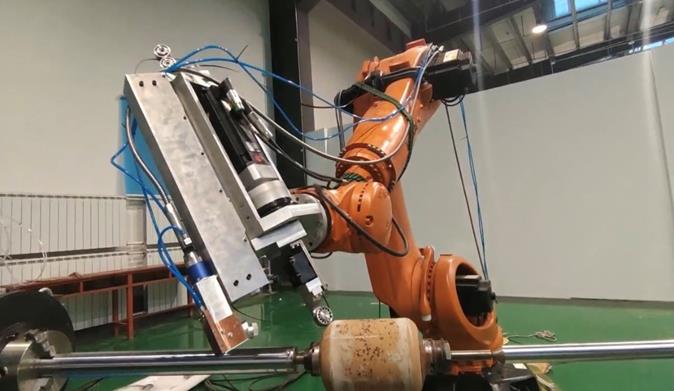
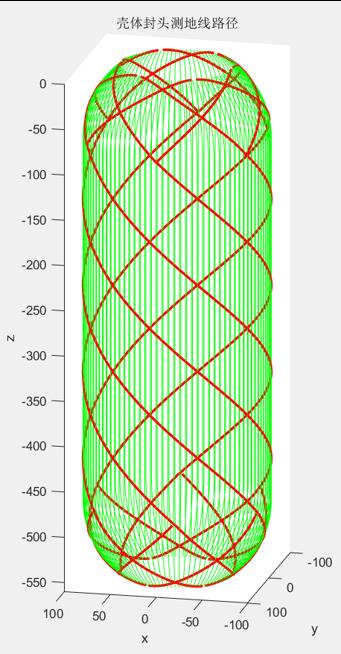
本课题针对先进复合材料成型这一对于国防、航天等领域有着重大战略意义的新兴技术展开研究:1.自主设计、搭建多自由度机器人式铺放平台,针对回转壳体进行铺放实验,并对铺放过程中的铺放速度、铺放压力、铺放温度等多种工艺参数进行动态匹配控制。2.对于铺放原理研究方面,本课题针对回转壳体进行了铺放轨迹的规划与控制研究,包括铺放轨迹函数方程求解、铺放头姿态控制、以及铺放过程中的干涉抑制控制。3.针对回转壳体封头部位的铺放,进行了封头铺放厚度预测算法的研究,构建了壳体封头部位的连续铺放算法。4.对于铺放过程中机器人控制方面,进行了铺放过程中多轴协同运动控制的研究,包括多轴速度的合成,附加轴与六自由度机器人的协同控制,以及铺放任务下铺放机器人及其附加轴的标定研究。